
Insect_bot_mini-DFRobot
- Вступление Insect Bot mini - это легко собираемый робот для молодых инженеров от 6 до 100 лет. Собрав...
- Руководство
- Требования
- Больше документов
Вступление
Insect Bot mini - это легко собираемый робот для молодых инженеров от 6 до 100 лет. Собрав этого робота, вы изучите основы робототехники с точки зрения того, как все компоненты работают вместе. Есть микроконтроллер, который работает как мозг робота и два серводвигателя для движения. ИК-датчик на его голове будет действовать как глаз, чтобы обнаружить препятствия впереди. Программирование можно выполнить, просто подключив контроллер Beetle к USB-порту компьютера и используя бесплатное программное обеспечение Arduino IDE с веб-сайта arduino.cc.
Руководство
Схема подключения
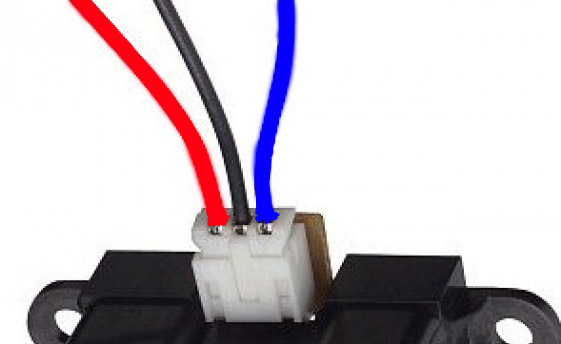
Пожалуйста, убедитесь, что ваш кабель датчика соответствует расположению контактов на Beetle_shield , Контакты есть (начиная с платы микроконтроллера наружу). Пожалуйста, проверьте Жук щит вики Больше подробностей.
Белый штекер, который соединяется с датчиком, имеет следующий порядок цветных проводов (если смотреть на датчик с лицевой стороны розеткой вверх):
Руководство
Какова цель этого урока?
Требования
Схема подключения
Образец кода
Код ниже показывает, как сделать Insect Bot мини-ходьбой и избегать препятствий.
Серво фронтСерво; Серво тылСерво; int walkSpeed = 500; int centerPos = 90; int frontRightUp = 70; int frontLeftUp = 110; int backRightForward = 70; int backLeftForward = 110; int centerTurnPos = 81; int frontTurnRightUp = 70; int frontTurnLeftUp = 110; int backTurnRightForward = 70; int backTurnLeftForward = 110; int distance = 0; int distanceCheck = 0; int collectDistance [5]; int i; int f; int r; int sensorPin = A1; int dangerDistance = 350; void setup () {frontServo.attach (9); RearServo.attach (10); pinMode (sensorPin, INPUT); frontServo.write (centerPos); rearServo.write (centerPos); задержка (3000); } void scan () {for (i = 0; i <5; i = i + 1) {distanceCheck = analogRead (sensorPin); collectDistance [i] = distanceCheck; } distance = (collectDistance [0] + collectDistance [1] + collectDistance [2] + collectDistance [3] + collectDistance [4]) / 5; задержка (20); } void moveForward () {for (f = 0; f <39; f ++) {frontRightUp ++; backLeftForward--; frontServo.write (frontRightUp); rearServo.write (backLeftForward); задержка (10); } для (r = 0; r <39; r ++) {frontRightUp--; backLeftForward ++; frontServo.write (frontRightUp); rearServo.write (backLeftForward); задержка (10); }} void moveBackRight () {frontServo.write (frontRightUp); tailServo.write (backRightForward -6); задержка (110); frontServo.write (centerPos); RearServo.write (centerPos -6); задержка (80); frontServo.write (frontLeftUp + 9); tailServo.write (backLeftForward -6); задержка (110); frontServo.write (centerPos); rearServo.write (centerPos); задержка (80); } void moveTurnLeft () {frontServo.write (frontTurnRightUp); rearServo.write (backTurnLeftForward); задержка (110); frontServo.write (centerTurnPos); rearServo.write (centerTurnPos); задержка (80); frontServo.write (frontTurnLeftUp); rearServo.write (backTurnRightForward); задержка (110); frontServo.write (centerTurnPos); rearServo.write (centerTurnPos); задержка (80); } void led () {for (int l = 0; l <= 5; l ++) {digitalWrite (13, HIGH); задержка (50); digitalWrite (13, LOW); задержка (100); }} void loop () {scan (); if (distance> 1) {if (distance> dangerDistance) {led (); for (int i = 0; i <= 3; i ++) {moveBackRight (); Задержка (walkSpeed); } for (int i = 0; i <= 3; i ++) {moveTurnLeft (); Задержка (walkSpeed); }} else {moveForward (); задержка (walkSpeed / 100); }}}
Больше документов
 Получить Комплект для насекомых из магазина DFRobot или ДФРобот Дистрибьютор .
Получить Комплект для насекомых из магазина DFRobot или ДФРобот Дистрибьютор .
Повернись к вершине
Похожие
Звездный путь онлайн: победа это жизньСледующее крупное расширение Star Trek Online , Victory is Life , выходит на ПК в июне и включает двенадцать оригинальных актеров Deep Space Nine . Актеры включают Рене Оберджонуа, Джеффри Комбса, Арона Эйзенберга, Макса Гроденчика, Дж. Г. Герцлера, Саломе Йенс, Чейза Мастерсона, Эндрю Робинсона, Бампера Робинсона (который сыграл подросткового Джема Хадара в «Заброшенном» и который сыграет Старшего Первого Дукана Рекса), Армин Minecraft Скачать для Windows на английском языке
... от первого лица, которая дает вам возможность исследовать мир, построенный полностью из блоков - будь то земля, камень, песок или другие элементы, найденные в природе - и создать свое собственное приключение. Чтобы играть в Minecraft, вы должны иметь учетную запись Mojang. Если у вас его нет, нажмите здесь и заполните данные для регистрации. Также стоит помнить, что игра платная, хотя и имеет демоверсию. Чтобы узнать TrackR bravo - Bluetooth-локатор с функцией Crowd Locate
Что такое TrackR? TrackR - это самый простой способ найти потерянные или сломанные предметы. Присоединяйтесь к миллиону людей, закажите TrackR сегодня, и вы никогда больше ничего не потеряете. Как это работает? В локаторе Bluetooth используется технология Crowd Locate, благодаря которой пользователь автоматически получает уведомление, когда элемент находится рядом с любым пользователем приложения TrackR (более 1,8 миллиона уведомлений в день по всему миру). Epic Games 'Fortnite
... до 17:00 по восточному поясному времени! Привет, Фортнит Фэмили, В нашем патче для V.1.11 у нас есть обновленное обновление, включая начало 2-го сезона для Fortnite Battle Royale и новый Battle Pass! Кроме того, у нас есть зимнее мероприятие «Спасите мир» от «Fortnite Guide to Holiday Survival», в котором представлены глобальный инвентарь, новая линия квестов, герои праздников, оружие и хранилище валют для событий (обман!). 2 сезон Battle Pass - Королевская битва в Форните Electronic Arts SimCity 4 Deluxe (цифровой код)
Эта кнопка открывает диалоговое окно, в котором отображаются дополнительные изображения для этого продукта с возможностью увеличения или уменьшения. eDelivery Мы отправим этот товар по электронной почте вскоре после обработки вашего заказа. Netflix на Android загрузит ваши любимые фильмы для вас
Удобство для пользователя всегда должно быть на вершине списка приоритетов для крупных корпораций. Netflix вытекает из этого предположения, которое вскоре запустит новый сервис для пользователей Android под названием Smart Downloads. Компания собирается ... скачать ваши любимые фильмы для вас. Производственная библиотека, доступная на Netfliks, подвержена постоянным изменениям, и то же самое происходит с технологией, используемой американской 100 забавных, интересных вопросов по меткам братьев и сестер, никто не спрашивает 2019
... оторые ты задаешь своему брату (брату или сестре), чтобы определить, насколько хорошо вы оба знаете друг друга. Это действие обычно выполняется, когда вы сидите перед камерой и снимаете видео, чтобы загрузить его на YouTube после того, как ваш брат ответил на все вопросы тега. Так чего ждать? Ниже приведен наш список лучших вопросов, которые можно задать своему брату или сестре. Будьте абсолютно удобны, чтобы спросить, поделиться и весело провести время со своим любящим родным PlayStation VR отличный тест - 5 самых больших преимуществ и недостатков
... летит сюда. Вопреки внешнему виду, это не так уж и плохо. Driveclub VR стоит смешные 79 злотых. Бэтмен: Arkham VR это расход 84 злотых. PlayStation VR World стоит 169 злотых. За 79 злотых мы купим бильярдную игру Hustle Kings VR. Еще меньше стоит Super Stardust Ultra VR - всего 49 злотых. То же самое хотят производители, которые строят башни Tumble VR. «Ужас до рассвета»: «Кровавая лихорадка» - это также расход ниже символической «stówka». Руководство для родителей по Minecraft
... до 13+ в зависимости от того, в какую версию игры вы играете. Детей не просят подтвердить возраст, когда они регистрируются. Если пользователь младше 13 лет и он регистрируется в своем правильном возрасте, некоторые функции игры недоступны, например, изменение настроек, совершение покупок, игра в Minecraft Realms или общение в свитках. Почему Minecraft так популярен среди детей? Minecraft очень популярен среди детей, особенно в возрасте от 6 до 13 лет. Что делает Изменения в World of Tanks - грядет новый графический движок Core
Мы играем в World of Tanks уже восемь лет. В то время World of Tanks завоевал сердца многих людей. Тот факт, что это не первый лучший титул, может быть выведен даже после того, как игра занесена в Книгу рекордов Гиннеса, для наибольшего числа игроков, одновременно зарегистрировавшихся на одном игровом сервере MMO. В январе 2013 года Новый обзор Nintendo 2DS XL - эта консоль является мастером компромисса
Поменьше. Быстрее. Зажигалка. Более удобный. Новая Nintendo 2DS XL - это консоль, которая завершает шесть лет инженерных работ на самой популярной в настоящее время портативной платформе, посвященной видеоиграм. Только какой смысл его публиковать, ведь несколько месяцев назад состоялась премьера Выдающийся
Комментарии
Или вы думаете, что это запланировано и возможно, или это просто мое желаемое за действительное?Или вы думаете, что это запланировано и возможно, или это просто мое желаемое за действительное? Источник: Полтер Это будет нажать на что?
Это будет нажать на что? Psst! Паутина находится на Facebook - посмотри на нас и посмотри, что мы там делаем. Купите это ?
Купите это ?: Если вы любите забавные маленькие аркадные трата времени, захватите Timberman. Это бесплатно с рекламой, или же 0,99 $ без рекламы в App Store. Судьбы навсегда - iPad Это изменится в этом году?
Это изменится в этом году? Вполне возможно, потому что это решение наконец-то заинтересовало крупнейшего законодателя моды в мире мобильных устройств, а именно Apple. Правда, гиганту из Купертино потребовалось некоторое время, но в iPhone 8 и X реализована индукционная зарядка в стандарте Qi. Вполне возможно, что будет достаточно стимула для популяризации этой технологии в больших масштабах, благодаря которой она, наконец, выйдет из той ниши, которую она занимала до сих пор. О ком это?
О ком это? Принц Гарри и Меган Маркл скоро скажут «да»! Свадьба этой знаменитой пары назначена на 19 мая 2018 года в позднеготической часовне св. Джордж, расположенный в Виндзорском замке. Хотя мы знаем дату в течение нескольких недель, список гостей до сих пор держится в секрете. Помимо большой королевской семьи, родственников будущей невесты, послов, президентов, друзей и знаменитостей, в списке также появились имена двух бывших девушек. Lunar: «Серебряная звезда» была прекрасной RPG, но стоило ли это 299 долларов за прекрасное дополнение?
Lunar: «Серебряная звезда» была прекрасной RPG, но стоило ли это 299 долларов за прекрасное дополнение? За несколько дней до того, как массовые консольные геймеры начали заниматься японской поп-культурой, такие драгоценности, как Snatcher и Popful Mail, передали право владения Sega CD небольшому эксклюзивному клубу. Гораздо менее простительным, чем Sega CD, был 32X. Какими бы ни были намерения, стоящие за вторым дополнением Genesis, его сочетание плохой синхронизации, плохого обмена Это один с заклинаниями для слинга и демонов для убийства?
Это один с заклинаниями для слинга и демонов для убийства? Пробираетесь сквозь звезды в качестве шахтера или корпоративного гиганта? Разгадывать древние заговоры и бороться с ужасами Лавкрафта? Может быть, это все из них. Но давайте не будем забегать вперед. Что такое MMO? Ну, эти часто используемые буквы представляют собой слова Massively Multiplayer Online и относятся к играм, в которых сотни, если не тысячи, игроков собираются вместе в одном мире. ММО, такие как World of Warcraft, предлагают Xbox One дает отличный игровой опыт, как мало, но в повседневной жизни со всевозможными другими соблазнами, что в нем такого, чего вы не можете получить больше нигде?
Xbox One дает отличный игровой опыт, как мало, но в повседневной жизни со всевозможными другими соблазнами, что в нем такого, чего вы не можете получить больше нигде? Computerworld дал машине три месяца, чтобы убедить нас. Рекламные посты от Sii Цифровое преобразование не может обойтись без непрерывного тестирования Это будет традиционный опыт виртуальной реальности или просто виртуальный торговый центр?
Это будет традиционный опыт виртуальной реальности или просто виртуальный торговый центр? Последний вариант звучит менее чем идеально. Однако Loop VR будет совместим с большинством 5- и 6-дюймовых телефонов, поэтому у него есть преимущество в совместимости. Наконец, особое упоминание должно идти к Брайану Мэй. Да, THE Brian May, из легендарной рок-группы Queen 70-х. Недавно он рассказал TrustedReviews о выпуске собственной виртуальной гарнитуры VR, Owl VR. Как это возможно?
Как это возможно? Искусство заключается не только в достижении наименьшей массы устройства, но и в соответствующем распределении центров тяжести. PlayStation VR имеет прочно закрытый верхний и задний элементы. Благодаря этому самая тяжелая часть с экраном не бежит вперед. Эффекта «оторвать голову» нет. Оборудование хорошо сбалансировано, а вес очень хорошо распространяется по всей голове. Итак, как это работает?
Итак, как это работает? Есть три режима игры; «Ручной режим» - подключение Joy-Cons к базовому блоку для воспроизведения на ходу; «Режим ТВ», который соединяет систему через док-станцию с телевизором, при этом контроллеры подключаются к центральному модулю - рукоятке Joy-Con - или синхронизируются с «Pro Controller» в стиле Xbox (приобретается отдельно) и «Настольный режим» ', в которой используется встроенная подставка, позволяющая отображать экран в любом месте в вертикальном положении, с
Как это работает?
Так чего ждать?
Почему Minecraft так популярен среди детей?
Или вы думаете, что это запланировано и возможно, или это просто мое желаемое за действительное?
Это будет нажать на что?
Купите это ?
Купите это ?
Это изменится в этом году?
О ком это?
О ком это?